
www.kamps.com.my
 |
| ROV working on subsea structure |
 |
| Remote control & monitors |
While the oil & gas industry uses the majority of ROVs; other applications include science, military and salvage. Science usage is discussed below, the military uses ROV for tasks such as mine clearing and inspection.
 |
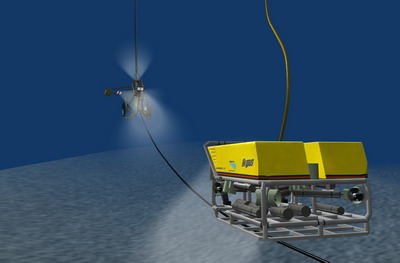
| ROV at work |
Conventional R.O.V.s are built with a large flotation pack on top of an aluminium chassis, to provide the necessary buoyancy. Syntactic foam is often used for the flotation. A tool sled may be fitted at the bottom of the system and can accommodate a variety of sensors. By placing the light components on the top and the heavy components on the bottom, the overall system has a large separation between the center of buoyancy and the center of gravity: this provides stability and the stiffness to do work underwater.
 |
| ROV Ship Hull Inspection |
Electrical cables may be run inside oil-filled tubing to protect them from corrosion in seawater. Thrusters are usually in all three axes to provide full control. Cameras, lights and manipulators are on the front of the ROV or occasionally in the rear to help in maneuvering.
The majority of the work class ROVs are built as described above; however, this is not the only style in ROV building. Specifically, the smaller ROVs can have very different designs, each geared towards its own task.
Classification
Submersible ROVs are normally classified into categories based on their size, weight, ability or power. Some common ratings are:
 |
| Micro ROV |
- Micro - typically Micro class ROVs are very small in size and weight. Today’s Micro Class ROVs can weigh less than 3 kg. These ROVs are used as an alternative to a diver, specifically in places where a diver might not be able to physically enter such as a sewer, pipeline or small cavity.
- Mini - typically Mini Class ROVs weigh in around 15 kg. Mini Class ROVs are also used as a diver alternative. One person may be able to transport the complete ROV system out with them on a small boat, deploy it and complete the job without outside help. Occasionally both Micro and Mini classes are referred to as "eyeball" class to differentiate them from ROVs that may be able to perform intervention tasks.
- General - typically less than 5 HP (propulsion); occasionally small three finger manipulators grippers have been installed, such as on the very early RCV 225. These ROVUs may be able to carry a sonar unit and are usually used on light survey applications. Typically the maximum working depth is less than 1,000 metres though one has been developed to go as deep as 7,000 m.
- Light Workclass - typically less than 50 hp (propulsion). These ROVs may be able to carry some manipulators. Their chassis may be made from polymers such as polyethylene rather than the conventional stainless steel or aluminium alloys. They typically have a maximum working depth less than 2000 m.
 |
| Heavy workclass ROV |
- Heavy Workclass - typically less than 220 hp (propulsion) with an ability to carry at least two manipulators. They have a working depth up to 3500 m.
- Trenching/Burial - typically more than 200 hp (propulsion) and not usually greater than 500 hp (while some do exceed that) with an ability to carry a cable laying sled and work at depths up to 6000 m in some cases.
 |
| Cable burial/trenching |
Submersible ROVs may be "free swimming" where they operate neutrally buoyant on a tether from the launch ship or platform, or they may be "garaged" where they operate from a submersible "garage" or "tophat" on a tether attached to the heavy garage that is lowered from the ship or platform. Both techniques have their pros and cons; however very deep work is normally done with a garage.
 |
| Submersible ROV |
Article from Wikipedia, the free encyclopedia

Contact us:
E-mail: enquiry@kamps.com.my
Website: www.kamps.com.my
No comments:
Post a Comment